These scripts will be able to provide an intermediate GUI and calculate both forward and inverse kinematics for PUMA-Type 6DoF robots
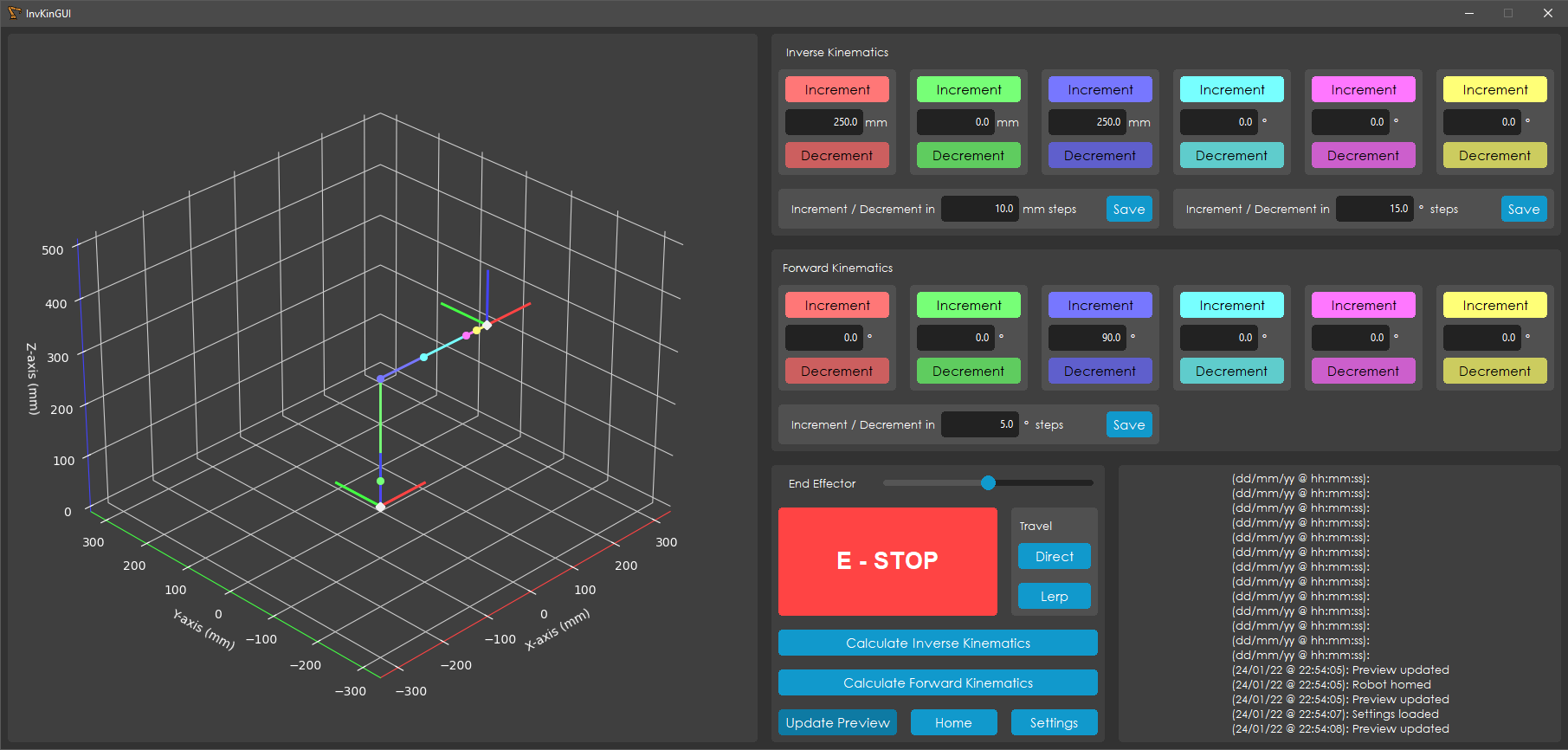
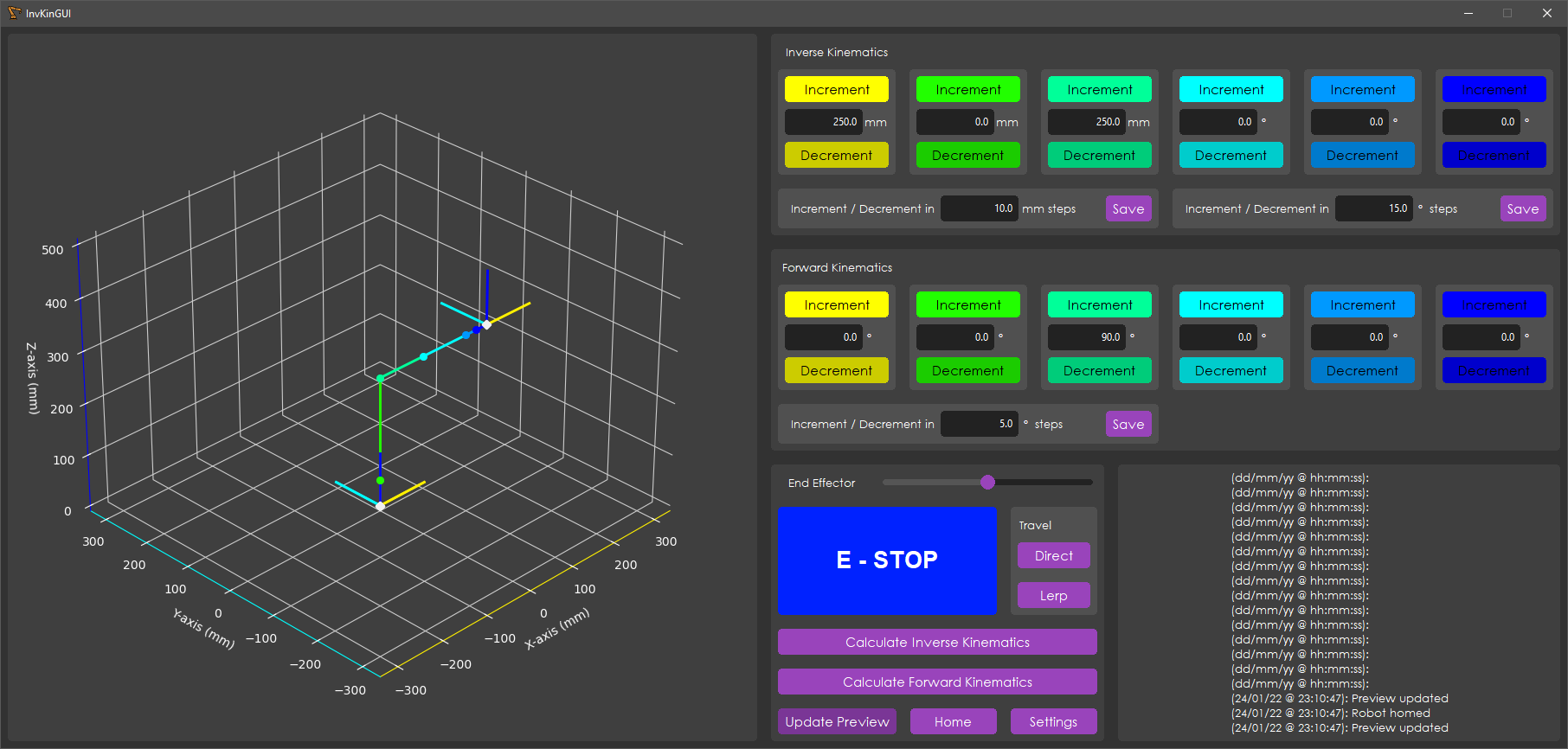
InvKinGUI will provide a user interface so that you can control your robot. The matplotlib plot shows a preview of the calculated joint positions and allows you to verify them before executing a move. It has been designed to be easily imported into other programs for controlling your specific robot. You are able to customise the GUI to make it either look nicer or provide a little performance boost if you are running on low-power hardware like a raspberry pi.
The functions have been laid out neatly and the code has been formatted so that it isn't too hard for beginners to use and understand. Useful error messages are provided when errors are encountered for easy fixing. Settings can be changed directly from the text file if need be.
The program handles the robot like the below diagram, the GUI uses degrees for the unit of angle but the radian is used in the code itself.
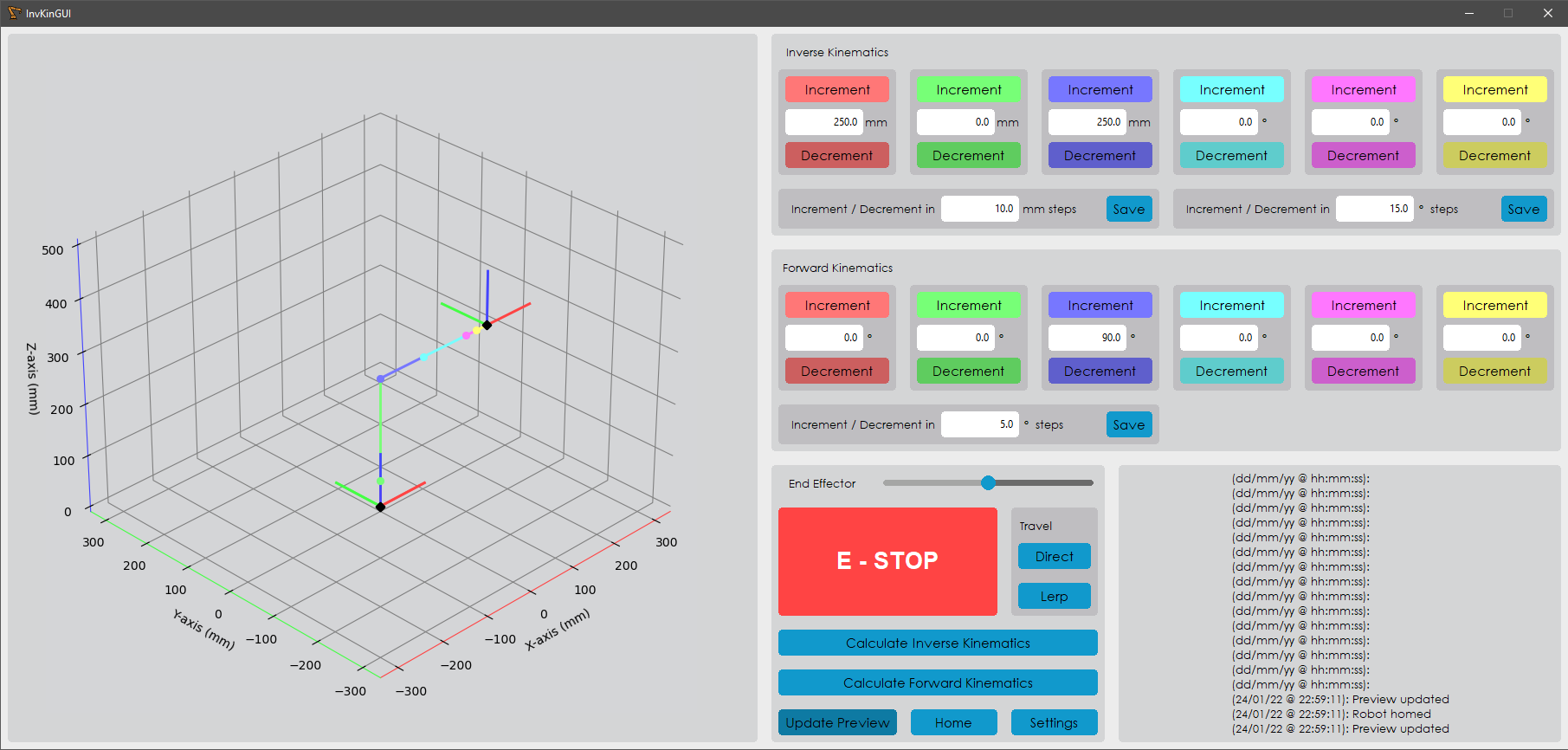
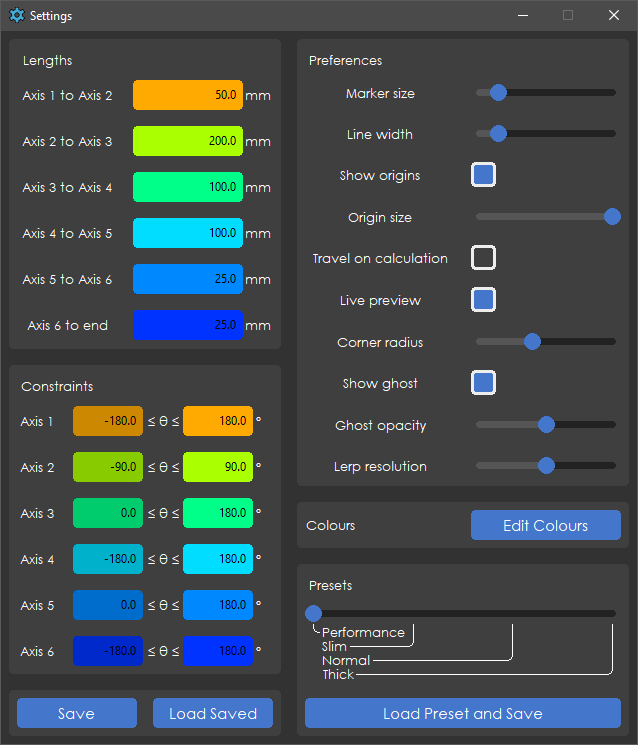
The GUI has been redesigned to be easier to navigate, look more aesthetically pleasing and it can even change its colours. Not only does this give us that sweet sweet dark mode we all know and love but also to account for the colourblind. Seperate colour palettes for the three most common types of colour blindness (protanopia, deuteranopia and tritanopia) can be selected from the colours menu in settings.
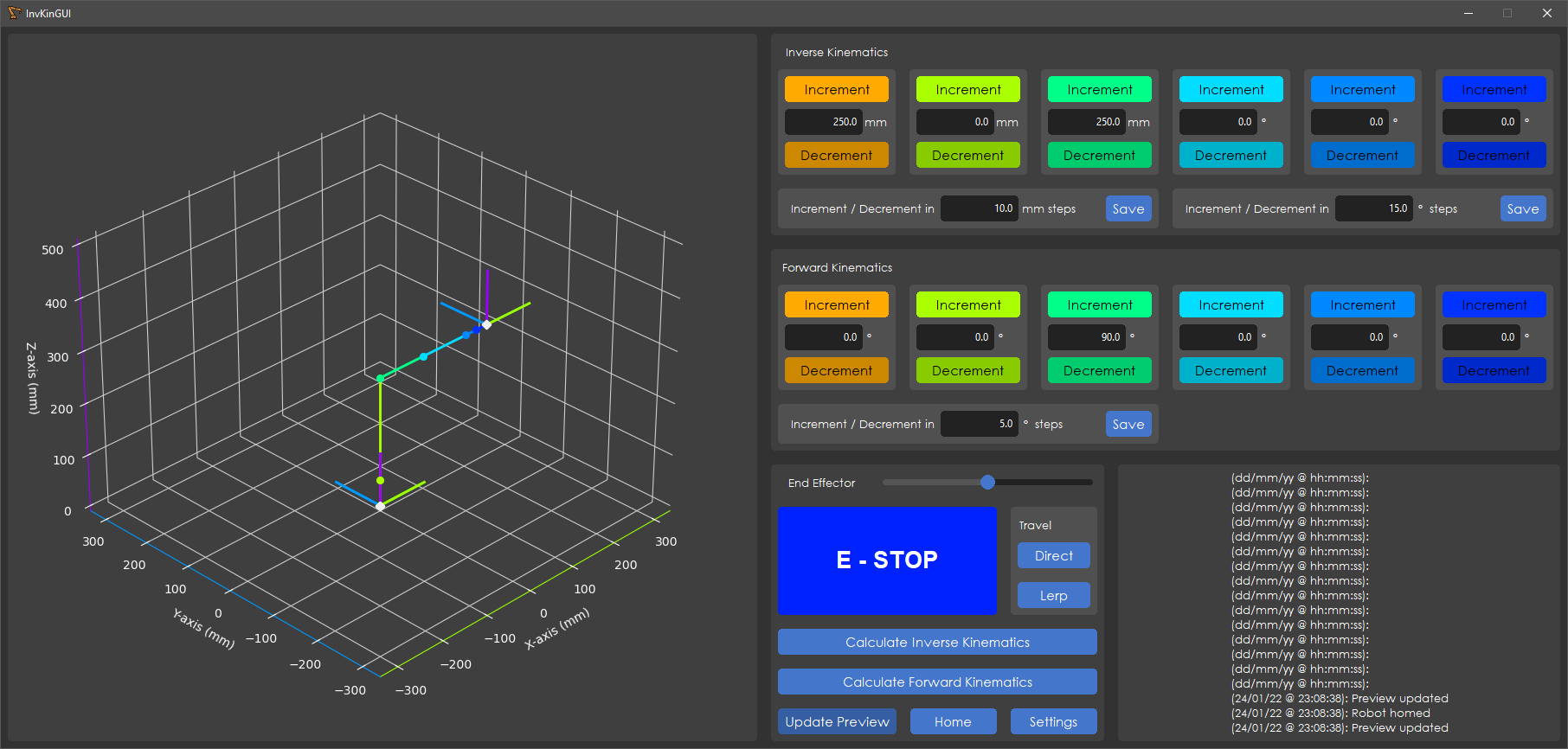
The window you will interact with most
Show light mode and colourblind modes
light mode
dark mode protanope
dark mode deuteranope

dark mode tritanope
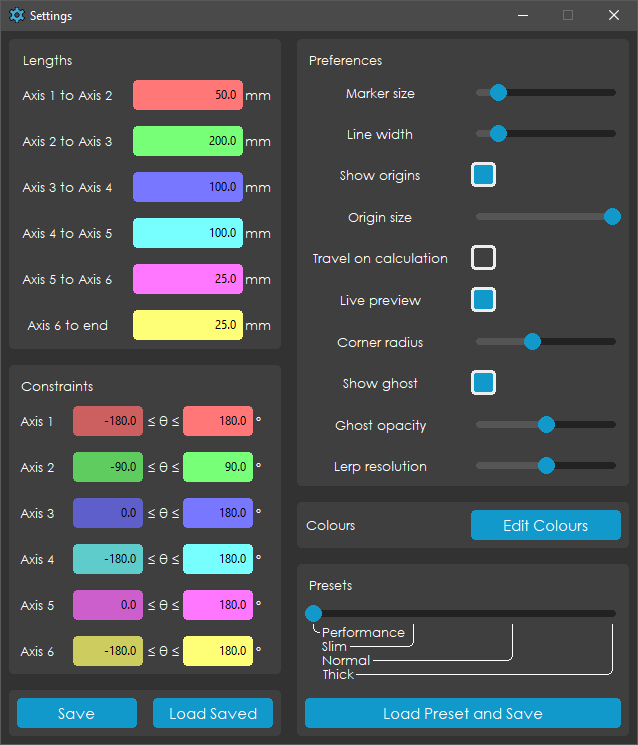
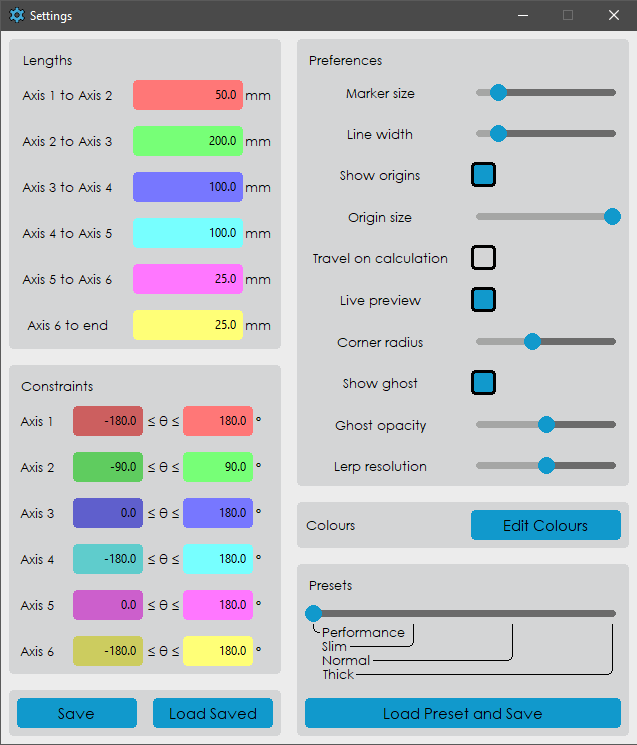
Need to tailor the program to be more like how you want it? settings is the place to visit, select a preset or push all the buttons until something works.
Show light mode and colourblind modes
light mode
dark mode protanope

dark mode deuteranope

dark mode tritanope
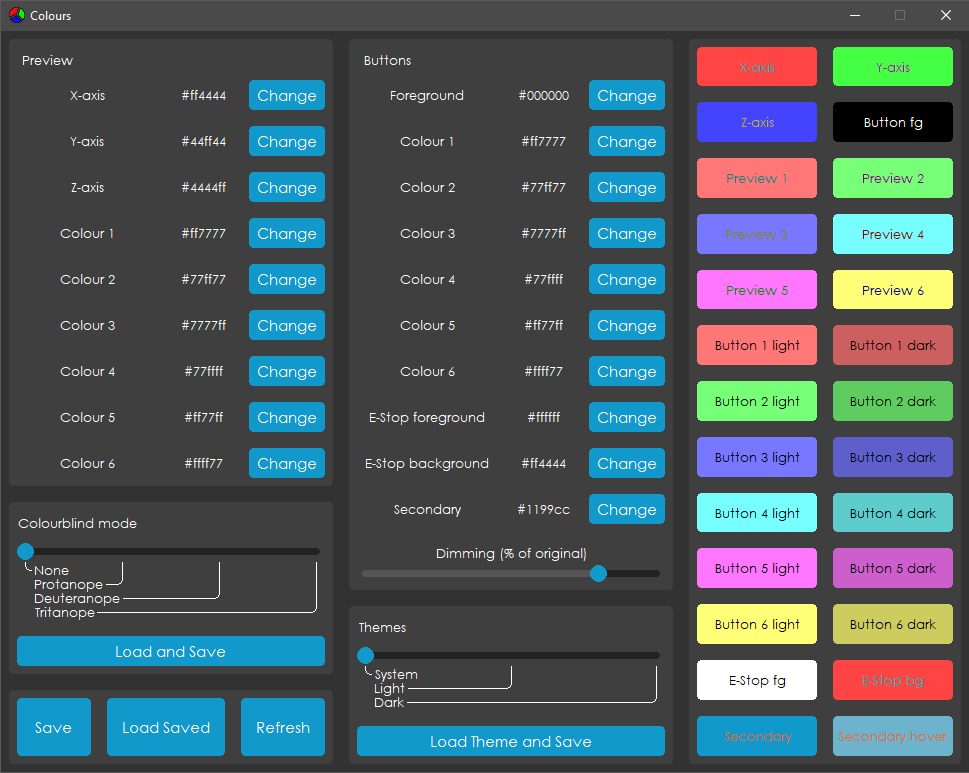
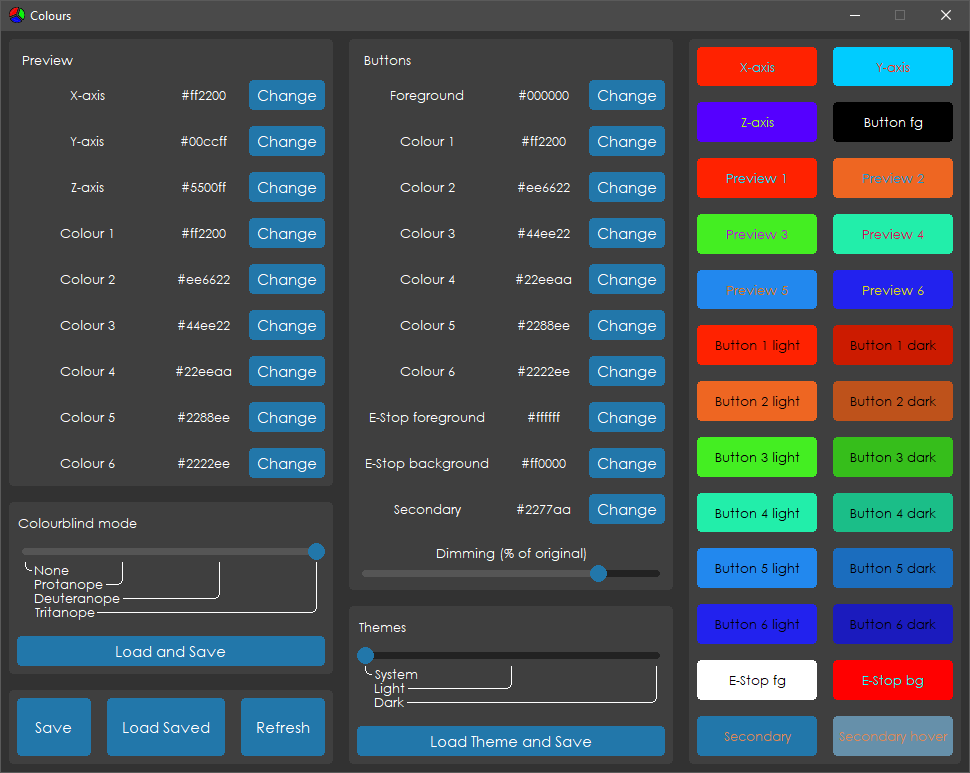
Don't like the preset colour options? Change them to be exactly what you want with this handy window
Show light mode and colourblind modes

light mode

dark mode protanope

dark mode deuteranope
dark mode tritanope
See also:
Displays an abstraction of your robot with the old position (ghost) in a more transparent view.
Takes a final destination and computes the angles required to reach that position. Use the increment and decrement buttons to change the target position or type it directly into the box.
Takes joint angles and computes the final destination. Use the increment and decrement buttons to change the target angles or type it directly into the box.
A slider that can be used for what you like really but I thought would be most useful to control the end effector
Sends the new position directly to the driving program.
When the "E-Stop" button is pressed eStopFunc() is called which will handle some internal magic and then call eStop().
You need to define eStop() before calling openMainWindow()
If you do not define you own then the following function will be created:
def eStop():
print("'eStop' function call")
Sends the new position directly to the driving program.
When the "direct" button is pressed directTravelFunc() is called which will handle some internal magic and then call directTravel(data) where the single parameter data is a dictionary of the following:
{'tx': float,
'ty': float,
'tz': float,
'rx': float,
'ry': float,
'rz': float,
'a1': float,
'a2': float,
'a3': float,
'a4': float,
'a5': float,
'a6': float,
'end': float}
You need to define directTravel(data) before calling openMainWindow()
If you do not define you own then the following function will be created:
def directTravel(data):
print("'directTravel' function call")
print(data)
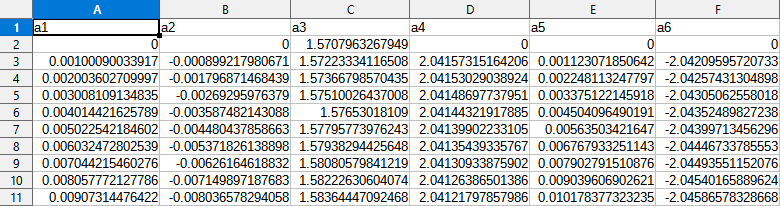
Uses linear interpolation to trace a straight line from the old position to the new position and the result is saved to a csv file.
When the "lerp" button is pressed lerpTravelFunc() is called which will handle some internal magic and then call lerpTravel(data) where the single parameter path is a string containing the location of the csv file.
You need to define lerpTravel(path) before calling openMainWindow()
If you do not define you own then the following function will be created:
def lerpTravel(path):
print("'lerpTravel' function call")
print(path)
Take the parameters from the inverse kinematics frame and use them to compute the joint angles required to reach the destination and put them into the forward kinematics frame. Compute time is sent to the log.
Take the parameters from the forward kinematics frame and use them to compute the destination of the end effector and put them into the inverse kinematics frame. Compute time is sent to the log.
Redraw the preview with the most up-to-date information. The button is disabled if settings "Live preview" is selected.
Send the robot to its home position.
Open the settings window.
Shows a list of what is being performed and when each event happened some calculation time statistics are also shown here.
See also:
Define the lengths of each joint on the robot.
Define the maximum range of freedom for each joint, kinematics will return an error if any joints fall outside these constraints.
Set the size of the dots representing each joint on the robot between 1 and 8 arbitrary units (steps of 1).
Set the thickness of the lines used to draw the robot between 1 and 8 arbitrary units (steps of 1).
Displays the origins at the start and end of the robot.
Length of the origins in % of the whole preview between 4 and 16% (steps of 1%).
Automatically perform a direct travel after kinematics are calculated.
This can be changed to perform lerp travel instead by changing all references of this
if bool(globalsettings["Automate"]):
directTravelFunc()
to this
if bool(globalsettings["Automate"]):
lerpTravelFunc()
Automatically update the plot after a change.
Change the corner radius for all widgets between 0 and 10px (steps of 1px).
Shows the old robot position as a ghost in the preview.
The percentage opacity of the ghost between 0 and 100% (steps of 10%).
The number of steps to lerp between the old and new position between 100 and 1000 steps (steps of 100).
- Marker size: 2
- Line width: 2
- Show origins: false
- Origin size: 0
- Travel on calculation: false
- Live preview: false
- Corner radius: 0
- Show ghost: false
- Ghost opacity: 0
- Lerp resolution: 100
- Marker size: 2
- Line width: 2
- Show origins: true
- Origin size: 16
- Travel on calculation: false
- Live preview: true
- Corner radius: 4
- Show ghost: true
- Ghost opacity: 50
- Lerp resolution: 500
- Marker size: 4
- Line width: 4
- Show origins: true
- Origin size: 8
- Travel on calculation: false
- Live preview: true
- Corner radius: 7
- Show ghost: true
- Ghost opacity: 40
- Lerp resolution: 500
- Marker size: 8
- Line width: 8
- Show origins: true
- Origin size: 8
- Travel on calculation: false
- Live preview: true
- Corner radius: 10
- Show ghost: true
- Ghost opacity: 30
- Lerp resolution: 500
save the current settings or load the settings currently saved.
See also:
Click the change button next to the colour you would like to change and the colour picker for your native OS will prompt you to select a new colour which will be applied but only take effect after a restart of the program.
Click the change button next to the colour you would like to change and the colour picker for your native OS will prompt you to select a new colour which will be applied but only take effect after a restart of the program.
Updated after you either choose a colour or when you click the refresh button and shows you all the colours you have selected which you can then save and the program will follow the selected colours after a restart.
Drag the slider to the appropriate colour blind mode and you can preview the new colours. If they do not suit your strength of colour blindness (program assumes 100% severity) you can change the colours using the selected mode as a starting point.
Select whether to use the light or dark theme, can also follow system settings.
Refresh the colour sample on the right-hand side.
Changes how much to dim one button from its partner to distinguish between them.
save the current settings or load the settings currently saved.